![]() GENERACIÓN
DE REGIONES DE INTERÉS CON POTENCIAL DE CONTENER PEATONES MEDIANTE BÚSQUEDA
FOCALIZADA USANDO VISIÓN MONOCULAR
GENERACIÓN
DE REGIONES DE INTERÉS CON POTENCIAL DE CONTENER PEATONES MEDIANTE BÚSQUEDA
FOCALIZADA USANDO VISIÓN MONOCULAR
GENERATION OF REGIONS OF INTEREST WITH POTENTIAL OF CONTAINING PEDESTRIANS THROUGH TARGET SEARCH BY USING MONOCULAR VISION
GERAÇÃO DE REGIÕES DE INTERESSE COM POTENCIAL PARA CONTÉM PROPÓSITOS PEDESTRES POR MEIO DE BUSCA ESPECÍFICA COM VISÃO MONOCULAR
![]()
Marco
Flores-Calero![]() 1-2, Bryan
Quinga
1-2, Bryan
Quinga![]() 3, Noemí Onofa
3, Noemí Onofa![]() 3 & Fabián
Gallardo
3 & Fabián
Gallardo![]() 4
4
1 Universidad de las Fuerzas Armadas - ESPE. Sangolquí-Ecuador. Correo: [email protected]
2 Departamento de Sistemas Inteligentes, Tecnologías I&H. Latacunga-Ecuador.
3 Carrera de Ingeniería en Electrónica, Automatización y Control. Universidad de las Fuerzas Armadas – ESPE. Sangolquí-Ecuador. Correo: [email protected], [email protected]
4 Escuela Politécnica del Chimborazo, campus extensión Norte Amazónica. Francisco de Orellana-Ecuador. Correo: [email protected]
Fecha de recepción: 20 de julio 2018
Fecha de aceptación: 1 de marzo de 2019
Este artículo presenta el desarrollo de un algoritmo para la generación de regiones de interés con alto potencial de contener peatones sobre imágenes monoculares. Para la generación de estas regiones se ha construido un algoritmo de generación de hiperplanos de búsqueda en función de la carretera junto con la generación de ventanas aleatorias, sobre ésta zona con una variación de la técnica desplazamiento de ventana piramidal; luego se realiza el pre-procesamiento usando los filtros de gradientes vertical y horizontal. Para comprobar que la región es un posible peatón, se parte de dos hipótesis respecto a la figura humana, la componente vertical es mayor que la horizontal y la fuerte simetría vertical. Mediante este proceso se obtiene un conjunto reducido y óptimo de regiones en el intervalo de entre 2 y 25 metros al frente de la cámara. Los resultados experimentales, desarrollados sobre las bases de datos presentes en el estado del arte, muestran que se tiene una tasa del 91% de ventanas válidas con respecto al total de ventanas verdaderas, a 25.38 fotogramas por segundo.
Palabras clave: Regiones de interés (ROIs), hiperplanos, carretera, imagen monocular, simetría humana.
ABSTRACT
This article presents an algorithm for regions of interest generation with high potential to contain a pedestrians over monocular images. The generation of these regions has been built using an algorithm to generate search hyperplanes in function of the road-surface together with the generation of random windows on this area plus a variation of the pyramidal sliding window technique; then the pre-processing is done using vertical and horizontal gradient filters. To verify that the region is a possible pedestrian, we start from two hypotheses regarding the human figure, the vertical component is greater than the horizontal and the strong vertical human-symmetry. Through this process, a reduced and optimal set of Regions is obtained in the range of between 2 and 25 meters in front of the camera. The experimental results, over the state of the art databases, show that there is a 91% rate of valid windows with respect to the total of true windows, at 25.38 frames per second.
Keywords: Region of interest (ROIs), hyperplanes, monocular image, human-symmetry, road-surface.
RESUMO
Este artigo desenvolve um algoritmo para gerar regiões de interesse com alto potencial para conter um pedestre. A geração de regiões é construído usando um algoritmo de geração de procurar hiperplanos na imagem baseada na estrada, juntamente com a geração de janelas aleatórias sobre esta área com uma variação de deslocamento técnico da janela piramidal; então o pré-processamento é feito usando filtros gradientes verticais e horizontais. Para verificar se o regiõe é um pedestre possível, partimos de duas hipóteses sobre a figura humana, o componente vertical é maior que a horizontal e a forte simetria vertical. Através deste processo, um conjunto reduzido e ideal de regiõe é obtido na faixa de 2 a 25 metros na frente da câmera. Os resultados experimentais, desenvolvidos em bases de dados presentes no estado da arte, mostram que há uma taxa de 91% de janelas válidas em relação ao total de janelas verdadeiras, a 25.38 quadros por segundo.
Palavras-chave: Regiões de interesse (ROIs), hiperplanos, imagem monocular, simetría humana, rodavia.
INTRODUCCIÓN
La detección de peatones, sobre imágenes monoculares, usando visión por computador e inteligencia artificial, es un área de interés para la comunidad científica por el sinnúmero de aplicaciones; uno de los principales campos son los sistemas de asistencia a la conducción, y en particular el desarrollo de sistemas para la detección de peatones (SDP), donde existen varios retos a superar [1], [2], [3], [4], [5], [6], [7]. Los principales factores que generan dificultad son las diferentes posturas, tamaños, movimientos, tipo y color de ropa, interacciones con el mundo e incluso condiciones climáticas [8]. En este contexto, la generación de regiones con potencial de contener un peatón se ha vuelto un paso previo importante para mejorar el desempeño, la eficiencia y la eficacia de cualquier SDP. Sin embargo este tema ha sido poco estudiando y publicado.
Por lo tanto, el aporte de esta investigación es la construcción de un nuevo método para la generación de ROIs, el mismo que toma en consideración la geometría de la carretera y la posición del vehículo para la construcción de un conjunto de hiperplanos, en función de la distancia, donde existe alta posibilidad de contener peatones. Posteriormente, usando una variación sofisticada de SWP (Sliding Window Pyramid), los gradientes y la simetría vertical se genera un conjunto de ROIs válidas, en varias escalas.
1.1 Estado del arte
La generación regiones de interés consiste en procesar la imagen de entrada y extraer regiones con alto potencial a contener un peatón [9]. Este proceso es sumamente importante para reducir el tiempo de cómputo y para mejorar los resultados de eficiencia y eficacia en todo tipo de sistema de detección de peatones.
En este contexto, la técnica más utilizada para la generación de ROIs es Sliding Window (SW), la cual consiste en realizar un barrido y escaneo exhaustivo, usando ventanas en varias escalas que se deslizan sobre toda la imagen. La mayor desventaja es el alto costo computacional, lo que obstaculiza el desarrollo de aplicaciones en tiempo real [11].
Así, Shou et al [10] han utilizado la técnica Fuzzy C-means para segmentar la imagen y generar un conjunto de ROIs con alto potencial de contener peatones. En otro caso, para detectar peatones a distintas distancias se utiliza SWP en [11]. En [12] se utiliza SWP junto la imagen integral y el descriptor HOG (Histogram of Oriented Gradients), para extraer características y reducir el tiempo de cómputo. En [9] se generan las ROIs haciendo uso de SWP, en una región de la imagen donde el peatón es más propenso a colisionar con el vehículo. En [13] se propone una nueva variación de SW y destinada a realizar el escaneo de toda la imagen con menor tiempo computacional, para lo cual implementa ventanas aleatorias de varias dimensiones, sobre lugares con más potencial a contener peatones, basándose en el teorema de Maximum Search Problems. Para reducir el tiempo de computo se usa la diferencia entre imágenes sucesivas, como se indica [14].
En [15] usan el método EdgeBox para la
generación de regiones con potencial de contener peatones. En [6]
eliminan los espacios donde es menos probable encontrar peatones, se realiza en
base a la estructura geométrica de la escena, la superficie de la carretera y
el cielo, a continuación se aplica las técnicas de ![]() -disparity
image y
-disparity
image y ![]() -disparity
mediante las cuales se logra obtener las ROIs con mayor potencial de candidato
a peatón.
-disparity
mediante las cuales se logra obtener las ROIs con mayor potencial de candidato
a peatón.
Este artículo está dividida en cinco secciones. En la primera se ha expuesto la importancia de la generación de ROIs en la detección de peatones usando visión monocular y el estado del arte. En la segunda se hace referencia a las bases de datos utilizadas y a la descripción del algoritmo propuesto para la generación de ROIs en tiempo real. Luego, la tercera presenta los resultados experimentales. Finalmente, las discusiones, conclusiones y los trabajos futuros están en la última sección.
2.1 Base de datos de experimentación
Para el desarrollo y evaluación del método de generación de ROIs se usaron las siguientes bases de datos: Daimler [16], INRIA [17] , ViiA [18], CVC-05 [19] y una base de datos propia. Todas las bases contienen imágenes tomadas bajo visión monocular, en ambientes urbanos de conducción, durante el día.
La base de datos propia fue generada en ambientes de tráfico, durante el día, en las calles de las ciudades de Quito, Sangolquí y Latacunga. Actualmente consta de cinco secuencias de imágenes de 640x480 píxeles. Cada secuencia tiene 800 fotogramas en color.
2.2 Descripción del sistema de generación de ROIs
La metodología propuesta para la generación de candidatos cuenta con tres sub-etapas: acondicionamiento de la imagen y cálculo de gradientes, generación de los espacios de interés (SOI) [6] y generación de ROIs. En la Figura 1 se observa el esquema propuesto.
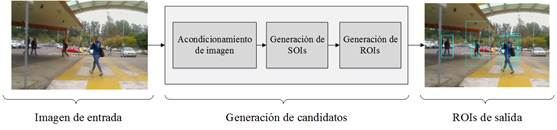
Figura 1. Generación de candidatos a peatones, en varias escalas, sobre imágenes durante el día [20].
Acondicionamiento de imagen
En esta etapa se normaliza la
imagen a ![]() pixeles
en escala de grises, luego se obtienen la imágenes de los gradientes vertical y
horizontal usando los filtros
pixeles
en escala de grises, luego se obtienen la imágenes de los gradientes vertical y
horizontal usando los filtros ![]() e
e
![]() .
.
Generación de SOIs
En esta etapa se generan varios hiperplanos, tomando como referencia la carretera por donde transita el vehículo [6]. En la Figura 2 se observan los tres pasos a seguir.
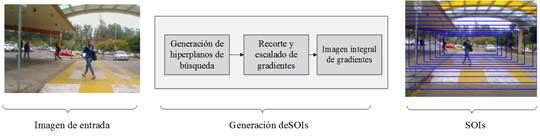
Figura 2. Etapas para la generación de SOIs sobre la imagen normalizada [20].
Ø Generación de hiperplanos de búsqueda: Para la generación de los hiperplanos de búsqueda se ha implementado un modelo que toma en consideración la estructura de la carretera. El hiperplano que es utilizado de modelo, sobre el mundo real, tienen 2 metros de altura y abarca todo el ancho de la escena vial, ver Figura 3. Luego, este plano es repetido en cada una de las escalas.
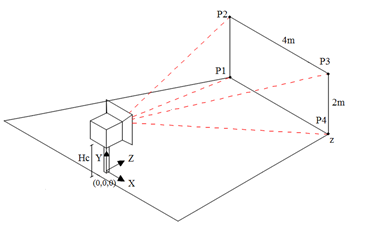
Figura 3. Hiperplano sobre la carretera, donde la cámara se encuentra a una altura fija sobre el vehículo, los puntos P1,P2, P3 y P4 generan .
Para ajustar el modelo se ha adquirido un conjunto de datos a varias distancias, con distintas alturas de cámara, para así cubrir distintas escalas dentro del plano de la carretera. La Tabla 1 presenta los datos para ajustar el hiperplano en cada escala.
Tabla 1. Datos con altura de la cámara a 1.2, 1.4 y 1.6 metros en referencia al suelo, bajo la hipótesis de carretera plana.
|
|
|
Coordenada en el eje Y |
||
|
Distancia (metros) |
Escala (s) |
1.2 (metros altura) |
1.4 (metros altura) |
1.6 (metros altura) |
|
2 |
0.4 |
432 |
420 |
462 |
|
3 |
0.5 |
372 |
360 |
406 |
|
4 |
0.6 |
335 |
322 |
370 |
|
5 |
0.7 |
308 |
298 |
341 |
|
7 |
0.9 |
279 |
265 |
306 |
|
10 |
1.2 |
253 |
239 |
281 |
|
15 |
1.7 |
234 |
216 |
259 |
|
20 |
2.2 |
223 |
204 |
249 |
|
25 |
2.7 |
215 |
196 |
241 |
Luego se ha construido una
función de segundo grado, tomando como variables la escala (eje X) y la
coordenada ![]() (eje
Y); así se tiene una ecuación que funciona en un rango continuo de altura de 1.2
metros a 1.6 metros:
(eje
Y); así se tiene una ecuación que funciona en un rango continuo de altura de 1.2
metros a 1.6 metros:
|
|
(1) |

donde ![]() es
la coordenada de la posición
es
la coordenada de la posición ![]() de
la carretera en función de la escala
de
la carretera en función de la escala ![]() .
La Figura 3(a) muestra los resultados de aplicar (1)
sobre una imagen de la carretera.
.
La Figura 3(a) muestra los resultados de aplicar (1)
sobre una imagen de la carretera.
Posteriormente, la altura y el ancho del hiperplano, sobre la imagen, vendrán dados por (2) y (3), respectivamente:
|
|
(2)
|
|
|
(3)
|
donde ![]() y
y
![]() son
la altura y el ancho del hiperplano, en una escala determinada,
son
la altura y el ancho del hiperplano, en una escala determinada, ![]() y
y
![]() son
la altura y el ancho predeterminados que varía en función de la escala, y
son
la altura y el ancho predeterminados que varía en función de la escala, y ![]() es
la función de la carretera dada por (1).
es
la función de la carretera dada por (1).
Empleando (1),
(2)
y (3)
se generan doce hiperplanos. La variación de la escala ![]() se
realiza en base a (4),
con lo cual se abarcar la mayor cantidad de distancias a analizar.
se
realiza en base a (4),
con lo cual se abarcar la mayor cantidad de distancias a analizar.
|
|
(4) |
(a) (b)
Figura
4. Representación
de ![]() (a)
e hiperplanos (b), en el rango de 2 metros a 20 metros en intervalos de 1
metro, a lo largo de la calzada [20].
(a)
e hiperplanos (b), en el rango de 2 metros a 20 metros en intervalos de 1
metro, a lo largo de la calzada [20].
La Figura
4(b) muestra los hiperplanos que se han generado, donde ![]() y
y
![]() toman
los valores de
toman
los valores de ![]() pixeles
y
pixeles
y ![]() pixeles,
respectivamente. Las ecuaciones (1), (2), (3) y (4) se han generado experimentalmente,
al modelar los planos sobre la carretera que se encuentra al frente del
vehículo, bajo la hipótesis de mundo plano.
pixeles,
respectivamente. Las ecuaciones (1), (2), (3) y (4) se han generado experimentalmente,
al modelar los planos sobre la carretera que se encuentra al frente del
vehículo, bajo la hipótesis de mundo plano.
Ø Recorte y escalado de los gradientes: Con los hiperplanos generados el siguiente paso es tomar estas coordenadas a fin de utilizarlas sobre las imágenes de los gradientes vertical y horizontal. Ver Figura 5, columna izquierda. Cuando se ha extraído cada una de los espacios de interés vertical y horizontal, es necesario escalar cada una de ellas, y es aquí donde ingresa la técnica de SWP, ya que en este proceso lo que se busca es mantener el tamaño de la ventana deslizante y escalar las SOIs, para siempre obtener ROIs con dimensiones de alto y ancho constantes a diferentes escalas, y de esta manera optimizar el procesamiento.
Generación de ROIs
En esta sub-etapa se obtienen las ROIs. La Figura 5 muestra el esquema propuesto.
Figura 5. Fases para la generación de ROIs sobre imágenes en tomadas durante el día [20].
Ø
SW aleatoria sobre las SOIs:
Las ventanas aleatorias, siguiendo la distribución uniforme se distribuyen
sobre cada SOI [13].
La ventana deslizante tiene ancho y alto fijos (![]() )
para hacer la búsqueda exhaustiva de peatones sobre un intervalo de
)
para hacer la búsqueda exhaustiva de peatones sobre un intervalo de ![]() píxeles
en el eje .
Por lo cual se escala la SOI y la ventana deslizante se mantiene fija, ver Figura
6.
píxeles
en el eje .
Por lo cual se escala la SOI y la ventana deslizante se mantiene fija, ver Figura
6.
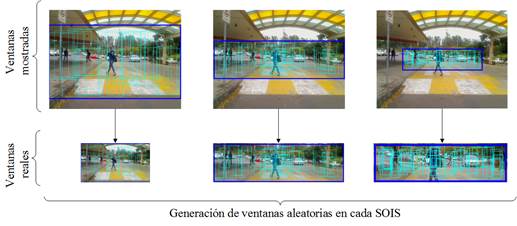
Figura 6. Generación de ventanas aleatorias por escala en cada SOI. En la parte superior el hiperplano original y en la fila inferior el hiperplano escalado [20].
Ø Filtros de gradiente y de simetría: En esta fase se obtienen las ventanas con mayor potencial a ser peatón, analizando los gradientes y la simetría de cada ventana. En la primera presunción se asume que, sobre la figura humana, el gradiente vertical es mayor que de gradiente horizontal. En Figura 7 se observan varios ejemplos donde se confirma esta hipótesis.
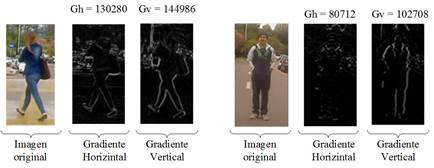
Figura 7. Gradientes vertical y horizontal y su comparación sobre varios ejemplos de peatones [20].
La segunda hipótesis hacer referencia simetría vertical de la figura humana, para medir la simetría se utiliza (5).
|
|
(5) |
En la Figura 8 se observan los valores de la simetría lado izquierdo respecto al lado derecho.
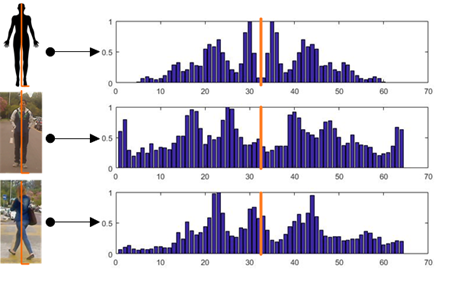
(a) (b)
Figura 8. Estimación de la simetría vertical tomando como punto de referencia el centro de la imagen de la figura humana [20], (a) y representación gráfica de la simetría sobre una base de datos (b).
El porcentaje de aceptación de simetría viene dado por (6) y (7).
|
|
(6) |
|
|
(7) |
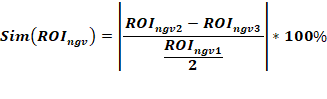
donde ![]() es
la simetría de la ventana
es
la simetría de la ventana ![]() expresada
en porcentaje,
expresada
en porcentaje, ![]() es
el gradiente vertical de la ROI n,
es
el gradiente vertical de la ROI n, ![]() :
es el gradiente vertical de la porción derecha de la ROI
:
es el gradiente vertical de la porción derecha de la ROI![]() ,
,
![]() es
el gradiente vertical de la porción izquierda de la ROI
es
el gradiente vertical de la porción izquierda de la ROI ![]() ,
,
![]() es
el umbral de aceptación de la ROI como candidato, en este caso es el
es
el umbral de aceptación de la ROI como candidato, en este caso es el ![]() .
.
Simetría vertical
Usando distintas bases de datos se obtiene los resultados de la Tabla 2. Esto demuestra la fuerte simetría vertical existente en la forma de un peatón.
Tabla 2: Simetría vertical de los peatones sobre las distintas bases de datos.
|
Base de datos |
Simetría vertical (%) |
|
CVC 05 |
97.10 |
|
INRIA |
99.40 |
|
Daimler |
99.10 |
|
ViiA |
92.60 |
|
PROPIA |
95.20 |
Medida de calidad en la generación de ROIs
Actualmente no existe
un método específico para evaluar la generación de ROIs [21].
Sin embargo, la evaluación fue realizada sobre la lista final de ROIs (![]() )
y la lista verdadera de peatones (
)
y la lista verdadera de peatones (![]() )
usando (3)
[22].
)
usando (3)
[22].
|
|
(8) |
Luego, para obtener una medida de la eficiencia de éste método, se ha tomado la cantidad de ventanas filtradas en relación al total de ventanas generadas mediante (9):
|
|
(9) |
donde
![]() es
el porcentaje de ROIs filtradas con posibilidad a contener un peatón en un
fotograma,
es
el porcentaje de ROIs filtradas con posibilidad a contener un peatón en un
fotograma, ![]() es
el número de ventanas filtradas con posibilidad a tener un peatón y
es
el número de ventanas filtradas con posibilidad a tener un peatón y ![]() es
el número total de ventanas generadas usando SWP en un fotograma. Los
resultados generados bajo este procedimiento se presentan en la Tabla
3.
es
el número total de ventanas generadas usando SWP en un fotograma. Los
resultados generados bajo este procedimiento se presentan en la Tabla
3.
Tabla 3. Evaluación del método de generación de ROIs en un conjunto de videos tomados durante el día.
|
VIDEO |
Núm. de Fotogramas |
Prom1. Peatones por fotograma |
Núm. total de ventanas por fotograma (%) |
Prom. de ventanas eliminadas por fotograma (%) |
Prom ventanas filtradas por fotograma
(%) |
Prom. y de ventanas con peatón por fotograma (%) |
Porcentaje de eficiencia de generación de ROIs (%) |
|
1 |
756 |
2.78 |
540 |
520.1 |
19.9 |
7.41 |
79.08% |
|
100.00% |
96.31% |
3.69% |
1.37% |
||||
|
1800 |
1734.5 |
65.5 |
25.43 |
91.12% |
|||
|
100.00% |
96.36% |
3.64% |
1.41% |
||||
|
2 |
429 |
2.92 |
540 |
513.2 |
26.8 |
10.12 |
77.81% |
|
100.00% |
95.04% |
4.96% |
1.87% |
||||
|
1800 |
1711.54 |
88.46 |
35.31 |
89.23% |
|||
|
100.00% |
95.09% |
4.91% |
1.96% |
||||
|
3 |
849 |
2.42 |
540 |
521.25 |
18.75 |
6.97 |
82.34% |
|
100.00% |
96.53% |
3.47% |
1.29% |
||||
|
1800 |
1746.66 |
53.34 |
20.86 |
90.46% |
|||
|
100.00% |
97.04% |
2.96% |
1.16% |
||||
|
1Prom = promedio |
|||||||
Al analizar la Tabla 3 se puede concluir que la eficiencia llega hasta el 91% en la generación de ROIs. El número total de ventanas se ha elegido experimentalmente, con el fin de trabajar en tiempo real con alta eficiencia.
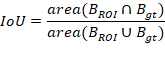
Figura
9.
ROIs generadas sobre una imagen de ![]() píxeles
en distintas escalas [20].
píxeles
en distintas escalas [20].
La Figura 9 se muestra un ejemplo completo donde están las ROIs obtenidas por este método, en las distintas escalas.
Tiempos de cómputo
El tiempo promedio de
ejecución por fotograma es de ![]() milisegundos.
Este valor fue calculado sobre 750 imágenes de
milisegundos.
Este valor fue calculado sobre 750 imágenes de ![]() píxeles.
El equipo de cómputo utilizado es Core i5 a 2.67 GHz con de 8 Gb de memoria RAM
y sistema operativo Ubuntu. Para acelerar este procedimiento se usó la imagen
integral [11].
píxeles.
El equipo de cómputo utilizado es Core i5 a 2.67 GHz con de 8 Gb de memoria RAM
y sistema operativo Ubuntu. Para acelerar este procedimiento se usó la imagen
integral [11].
DISCUSIONES Y CONCLUSIONES
En este trabajo se desarrolló un nuevo algoritmo para la generación de ROIs, a partir de visión monocular, en el contexto de los sistemas de detección de peatones para aplicaciones en seguridad vehicular.
Al modelar la carretera, bajo la hipótesis de un mundo plano, se generan hiperplanos focalizados de búsqueda con potencial de contener peatones en distintas distancias. Luego, con la introducción de ventanas, con distribución uniforme, se reduce significativamente el número de candidatos, para finalmente incorporar SW con la información del gradiente y la simetría para refinar la localización de ROIs.
Los resultados demuestran que el algoritmo logró una reducción de más del 98% de ventanas que no contenían a un peatón y una eficiencia del 91% del total de peatones presentes, procesando 25.38 fotogramas por segundo. Al comparar con el método Edge Boxes [23], que tiene un desempeño del 96%, con un costo computacional de 6.25 fotogramas por segundo, vemos que ésta propuesta es competitiva en función del tiempo de procesamiento.
En posteriores trabajos se incluirá un clasificador de personas para construir un detector de peatones, bajo visión monocular, que sea capaz de trabajar en tiempo real.
FUENTES DE FINANCIAMIENTO
Este proyecto ha recibido financiamiento indirecto, a través del préstamo de los equipos, de la empresa Tecnologías I&H.
DECLARACIÓN DE CONFLICTO DE INTERÉS
Los autores declaran que no existe conflicto de intereses.
APORTE DEL ARTÍCULO EN LA LÍNEA DE INVESTIGACIÓN
El presente artículo es un aporte en la línea de investigación de procesamiento digital de señales en el tema de detección de peatones usando visión por computador.
DECLARACIÓN DE CONTRIBUCIÓN DE CADA AUTOR
El diseño de la investigación, el desarrollo y la implementación de parte del software, la supervisión y el análisis de los resultados experimentales corresponden a M. Flores. Parte de la implementación del software y el desarrollo de los experimentos pertenecen a B. Quinga y N. Onofa. La redacción y la revisión del manuscrito recaen en F. Gallardo.
AGRADECIMIENTOS
Para el desarrollo de una parte significativa de este proyecto se ha contado con el apoyo de la empresa Tecnologías I&H, a ella nuestro agradecimiento. Además, agradecemos a los revisores anónimos por su valioso aporte ya que han contribuido significativamente en la mejora de este manuscrito.
REFERENCIAS
|
[1] |
R. Varga and S. Nedevschi, "Gradient-based Region of Interest selection for faster pedestrian detection," in IEEE International Conference Intelligent Computer Communication and Processing, 2013. |
|
[2] |
S. Kim and K. Cho, "Trade-off bertween Accuracy and Speed for Pederian Detection using HOG Feature," IEEE Third International Conference on Consumer Electronics, pp. 207-209, 2013. |
|
[3] |
X. Wang, M. Wang and W. Li, "Scene-Specific Pedestrian Detection for Static Video Surveillance," IEEE Transactions on Pattern Analysis and Machine Intelligence, pp. 361-374, 2014. |
|
[4] |
W. Ouyang, X. Zeng and X. Wang, "Single-Pedestrian Detection Aided by 2-Pedestrian Detection," IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014. |
|
[5] |
M. Mesmakhosroshahi, K. H. Chung, Y. Lee and J. Kim, "Depth gradient based region of interest generation for pedestrian detection," SoC Design Conference (ISOCC), 2014 International, pp. 156-157, 2014. |
|
[6] |
M. Wu, S. K. Lam and T. Srikanthan, "Stereo based ROIs generation for detecting pedestrians in close proximity," Intelligent Transportation Systems (ITSC), 2014 IEEE 17th International Conference, pp. 1929-1934, 2014. |
|
[7] |
C. Zhang, K. H. Chung and J. Kim, "Region-of-interest reduction using edge and depth images for pedestrian detection in urban areas.," SoC Design Conference (ISOCC), 2015 International , pp. 161-162, 2015. |
|
[8] |
X. Zhang, H.-M. Hu, F. Jiang and B. Li, "Pedestrian detection based on hierarchical co-occurrence model," Neurocomputing, pp. 861-870, 2015. |
|
[9] |
X. B. Cao, H. Qiao and J. Keane, "A low-cost pedestrian-detection system with a single optical camera," IEEE Transactions on Intelligent Transportation Systems, pp. 58-67, 2008. |
|
[10] |
N. Shou, P. Hong, H. Wang and L.-M. Meng, "An ROIs Based Pedestrian Detection System For," 5th International Congress on Image and Signal Processing, pp. 1205-1208, 2012. |
|
[11] |
A. López, E. Valveny and M. Vanrell, Deteccion de objetos - Sliding Window, 2012. |
|
[12] |
K. C. C. Y. S. H. Q. T. Z. J. &. L. Y. Lee, "Human detection using histogram of oriented gradients and human body ratio estimation," In Computer Science and Information Technology (ICCSIT), 2010 3rd IEEE International Conference , pp. 18-22, 2010. |
|
[13] |
V. H. C. de Melo, S. Leao, D. Menotti and W. R. Schwartz, "An optimized sliding window approach to pedestrian detection," 2014. |
|
[14] |
A. Halidou, X. You, M. Hamidine, R. A. Etoundi and L. H. Diakite, "Fast pedestrian detection based on region of interest and multi-block local binary pattern descriptors," omputers & Electrical Engineering, pp. 375-389, 2014. |
|
[15] |
C. Ling, "Image Detection Techniques on Daimler Pedestrian Monocular Data," Stanford, pp. 1-6, s.f.. |
|
[16] |
M. Enzweiler and M. Gavrila, "Daimler Mono Pedestrian Detection Bechmark Dataset," IEEE Trans. on Pattern Analysis and Machine Intelligence, pp. 2179-2195, 2009. |
|
[17] |
N. Dalal, "Finding People in Images and Videos," 2006. |
|
[18] |
M. Flores-Calero, D. Robayo and D. Saa, "Histograma de gradiente con múltiples orientaciones (HOG-MO) detección de personas," Revista Vínculos, pp. 138-147, 2015. |
|
[19] |
J. Marín, D. Vázquez, A. López, J. Amores and L.I. Kuncheva, "Occlusion handling via random subspace classifiers for human detection.," IEEE Transactions on Systems, Man, and Cybernetics (Part B) (ITSMC-B), 2013. |
|
[20] |
D. Kim and K. Lee, "Segmented-based region of interes generation for edestrian detection in far-infrarred image," Infrarred physics & Tecnology, pp. 120-128, 2013. |
|
[21] |
P. Dollar, C. Wojek, B. Schiele and P. Perona, "Pedestrian Detection: An Evaluation of the State of the Art," IEEE Transactions on Pattern Analysis and Machine Intelligence, pp. 743 - 761, 2012. |
|
[22] |
M. J. Flores Calero, N. E. Onofa Cuichán and B. G. Quinga Chungandro, "Repositorio Institucional de la Universidad de las Fuerzas Armadas ESPE," 2017. [Online]. Available: http://repositorio.espe.edu.ec/handle/21000/13930. |
|
[23] |
C. L. Zitnick and P. Dollar. “Edge Boxes: Locating Object Proposals from Edges”. European Conference on Computer Vision (ECCV 2014), pp 391-405. |
NOTA BIOGRÁFICA

Marco Flores Calero. ORCID iD
![]() https://orcid.org/0000-0001-7507-3325 Ingeniero Matemático de la Escuela Politécnica Nacional - Ecuador.
Posteriormente obtuvo su grado Magíster en Estadística en la Pontificia
Universidad Católica - Chile, luego realizó el Doctorado en Ingeniería
Eléctrica, Electrónica y Automática en la Universidad Carlos III de Madrid-
España. Actualmente es CEO de la empresa Tecnologías I&H y profesor titular
en la Universidad de las Fuerzas Armadas ESPE, Ecuador. Además, ha publicado sus
trabajos científicos en revistas de prestigio internacional.
https://orcid.org/0000-0001-7507-3325 Ingeniero Matemático de la Escuela Politécnica Nacional - Ecuador.
Posteriormente obtuvo su grado Magíster en Estadística en la Pontificia
Universidad Católica - Chile, luego realizó el Doctorado en Ingeniería
Eléctrica, Electrónica y Automática en la Universidad Carlos III de Madrid-
España. Actualmente es CEO de la empresa Tecnologías I&H y profesor titular
en la Universidad de las Fuerzas Armadas ESPE, Ecuador. Además, ha publicado sus
trabajos científicos en revistas de prestigio internacional.

Bryan Quinga Chungandro. ORCID
Id ![]() https://orcid.org/0000-0002-9551-6688 Ingeniero en Electrónica, Automatización y Control de la Universidad
de las Fuerzas Armadas ESPE, Pichincha (Ecuador). Actualmente es profesional en
libre ejercicio.
https://orcid.org/0000-0002-9551-6688 Ingeniero en Electrónica, Automatización y Control de la Universidad
de las Fuerzas Armadas ESPE, Pichincha (Ecuador). Actualmente es profesional en
libre ejercicio.

Noemí Onofa. ORCID Id ![]() https://orcid.org/0000-0002-4215-509X Ingeniera en Electrónica, Automatización y Control de la Universidad
de las Fuerzas Armadas ESPE, Pichincha (Ecuador). Actualmente es profesional en
libre ejercicio.
https://orcid.org/0000-0002-4215-509X Ingeniera en Electrónica, Automatización y Control de la Universidad
de las Fuerzas Armadas ESPE, Pichincha (Ecuador). Actualmente es profesional en
libre ejercicio.

Fabián Gallardo. ORCID iD
![]() https://orcid.org/0000-0001-6860-9697 Ingeniero Electromecánico de la Escuela Politécnica del Ejército,
posteriormente obtuvo su grado de Magister en Gestión en Energías en la
Universidad Técnica de Cotopaxi-Ecuador. Actualmente es profesor de la Escuela
Politécnica de Chimborazo extensión Norte Amazónica-Ecuador.
https://orcid.org/0000-0001-6860-9697 Ingeniero Electromecánico de la Escuela Politécnica del Ejército,
posteriormente obtuvo su grado de Magister en Gestión en Energías en la
Universidad Técnica de Cotopaxi-Ecuador. Actualmente es profesor de la Escuela
Politécnica de Chimborazo extensión Norte Amazónica-Ecuador.
![]()
Esta obra está sujeta a la Licencia Reconocimiento-SinObraDerivada 4.0 Internacional de Creative Commons. Para ver una copia de esta licencia, visite http://creativecommons.org/licenses/by-nd/4.0/ o envíe una carta Creative Commons, PO Box 1866, Mountain View, CA 94042, USA.